行星齿轮机构的八种传动状态_行星齿轮机构各种运动情况
这次主要分析拉维娜行星齿轮机构。
拉维娜行星齿轮机构
1) 机构特点:
由单排单级行星齿轮机构和单排双级行星齿轮机构组合而成;
其元件有小太阳轮、大太阳轮、行星架、齿圈、一级行星轮和二级行星轮;
行星齿轮机构传动原理和结构
单排单级行星齿轮机构和单排双级行星齿轮机构公用行星架和齿圈。
2) 变速原理:
轮与轮之间装有离合器或单向离合器,轮与壳体间有制动器,通过离合器、单向离合器和制动器,对三轮进行不同的连接或制动组合,使变速器得到各种档位的输出。
3) 传动比的计算
① 运动方程
前排是单排单级行星齿轮机构,运动方程为:
ns1+α1·nr1=(1+α1)·nc1 (1)
后排是单排双级行星齿轮机构,运动方程为:
行星齿轮机构传动原理和结构
ns2–α2·nr2=(1–α2)·nc2 (2)
由于齿圈和行星架共用,所以联立方程修改为
ns1+α1·nr=(1+α1)·nc
ns2–α2·nr=(1–α2)·nc
式中:ns1–大太阳轮转速;
ns2–小太阳轮转速;
nr–齿圈转速;
nc–行星架转速;
α1=齿圈齿数Zr 与大太阳轮齿数Zs1之比,
即α1=Zr/Zs1>1。
行星齿轮机构传动原理和结构
α2=齿圈齿数Zr 与小太阳轮齿数Zs2之比,
即α2=Zr/Zs2>1。
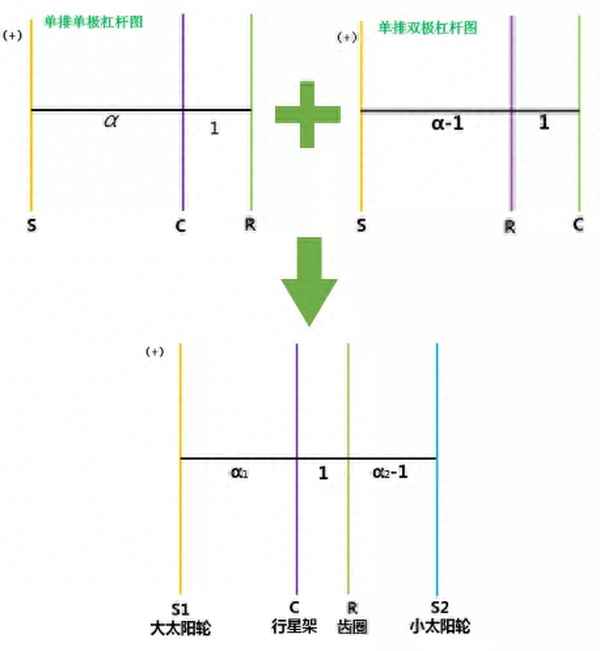
② 杠杆图
同理的将单排单极杠杆图和单排双级杠杆图结合起来就是拉维娜式行星齿轮机构的杠杆图。
四条竖直线依次代表大太阳轮S1、齿圈R、行星架C和小太阳轮S2;
竖直线上表示转速大小,向上为正,向下为负;
水平线距离为传动比,S1C距离为α1=Zr/Zs1,RC距离为1,S2C距离为α2=Zr/Zs2,S2R距离为α2-1;
采用相似三角形法来计算输入元件与输出元件的传动比。
下面结合一款基于拉维娜式行星齿轮的4AT变速器做一个分析:
如结构简图所示:
左端为发动机输入端,右端为输出端;
C1离合器控制发动机与小太阳轮的结合与分离;
C2离合器控制发动机与大太阳轮的结合与分离;
C3离合器控制发动机与行星架的结合与分离;
行星齿轮机构传动原理和结构
B1制动器可制动行星架;
B2制动器可制动大太阳轮;
F1单向离合器可限制行星架的负向旋转。
4AT档位工作表
4AT各档位杠杆原理图
D1档:C1结合,F1工作。
离合器C1结合,发动机与小太阳轮连接,小太阳轮顺时针旋转,带动外啮合的一级行星轮逆时针旋转,一级行星轮又带动外啮合的二级行星轮顺时针旋转,行星架以小太阳轮为轴逆时针旋转,但行星架逆时针旋转时被单向离合器F1锁止制动,于是二级行星轮驱动内啮合的齿圈顺时针旋转而输出动力。
同时二级行星轮还会带动外啮合的大太阳轮逆时针旋转。
运动方程计算:
在D1档中,C1结合,ns2为输入端;F1工作,nc=0;nr为输出端。
所以只用单排双极行星齿轮机构运动方程即可计算传动比:
引用方程:ns2–α2·nr=(1–α2)·nc
代入nc=0;则 i=ns2/nr =α2
杠杆图计算:
同样的,ns2为输入端;nc=0;nr为输出端。
采用相似三角形:ns2=α2·nr
则 i=ns2/nr =α2
在D1档的杠杆图中可以发现,采用离合器C1结合和制动器B1结合,也可实现如图所示的杠杆平衡,那为什这里需要增加一个单向离合器F1呢?是不是多此一举呢?欲搞清楚这个问题,就不得不说说D1档滑行的原理。
D1档行驶下,在松开油门这一瞬间,发动机的转速必然下降,然而整车由于惯性,其车速保持不变,也即齿圈转速不变。这时单向离合器F1解锁,行星架顺时针旋转,使得杠杆达到平衡(蓝色线所示),发动机对滑行无制动作用。
这里如果把单向离合器F1采用制动器B1代替,就会出现行星架被完全制动,由于发动机转速的降低,会使得齿圈的转速也会降低(紫色线所示),也就会出现发动机制动,这在低速行驶时我们不愿看到的,所以这里采用单向离合器F1比制动器B1更优秀。
D2档:C1结合,B2结合。
D2档中,离合器C1仍然结合,发动机与小太阳轮连接,小太阳轮顺时针旋转,带动外啮合的一级行星轮逆时针旋转,一级行星轮又带动外啮合的二级行星轮顺时针旋转,在这里就有所不同了。由于制动器B2结合,大太阳轮被固定,所以二级行星轮会带动内啮合的齿圈顺时针旋转,从而输出动力。
同时由于长行星轮自转加公转,带动行星架顺时针旋转,但对输出不起干涉作用。
运动方程计算:
在D2档中,C1结合,ns2为输入端;B2工作,ns1=0;nr为输出端。
所以必须通过两个行星排运动方程的联立才能求解:
引用方程:ns1+α1·nr=(1+α1)·nc
ns2–α2·nr=(1–α2)·nc
代入ns1=0 ;则α1·nr=(1+α1)·nc
约去nc ,ns2–α2·nr=(1–α2)· α1·nr/(1+α1)
则 i=ns2/nr =(α2 +α1)/(1+α1)
杠杆图计算:
同样的,ns2为输入端;ns1=0 ;nr为输出端。
采用相似三角形:ns2/ (α2 +α1) =nr(1+α1)
则 i=ns2/nr =(α2 +α1)/(1+α1)
D3档:C1结合,C2结合。
D3档中,离合器C1和离合器C2均结合,大太阳轮和小太阳轮连为一体,整个行星排按1:1整体输出,也称为直接档。
运动方程计算:
在D3档中,C1结合, C2结合, ns2= ns1,同为输入端;nr为输出端。
引用方程:ns1+α1·nr=(1+α1)·nc
ns2–α2·nr=(1–α2)·nc
代入 ns2= ns1 ;则ns2= ns1 = nr=nc
则 i=ns2/nr =1
杠杆图计算:
同样的,ns2= ns1,同为输入端;nr为输出端。
图形直观表达 i=ns2/nr =1
D4档:C3结合,B2结合。
D4档中,离合器C3结合,发动机与行星架连接,发动机带动行星架顺时针旋转。由于制动器B2结合,大太阳轮被固定,使得二级行星轮顺时针旋转,二级行星轮带动外啮合的齿圈顺时针旋转, 输出动力。
同时,二级行星轮会带动一级行星轮逆时针旋转,小太阳轮顺时针旋转。后排齿轮空转,对前排输出不干涉。
运动方程计算:
在D4档中,C3结合, nc为输入端;B2结合, ns1=0 ;nr为输出端。
所以只用单排单级行星齿轮机构运动方程即可计算传动比:
引用方程:ns1+α1·nr=(1+α1)·nc
代入 ns1=0 ;则α1·nr=(1+α1)·nc
则 i=nc/nr =α1/ 1+α1<1;
因此,D4档也称为超速档。
杠杆图计算:
同样的,, nc为输入端;B2结合, ns1=0 ;nr为输出端。
采用相似三角形:nr / (1+α1)=nc / α1
则 i=nc/nr =α1/ 1+α1<1;
R档:C2结合,B1结合。
在R档中,离合器C2结合,发动机与大太阳轮连接,发动机带动大太阳轮顺时针旋转。由于制动器B1结合,行星架被固定,使得二级行星轮逆时针旋转,二级行星轮带动外啮合的齿圈也逆时针旋转, 输出反方向动力,实现倒档。
同时,二级行星轮会带动一级行星轮顺时针旋转,小太阳轮逆时针空转。
运动方程计算:
在R档中,C2结合, ns1为输入端;B1结合, nc=0 ;nr为输出端。
所以只用单排单级行星齿轮机构运动方程即可计算传动比:
引用方程:ns1+α1·nr=(1+α1)·nc
代入nc=0 ;则ns1+α1·nr=0;
则 i=ns1/nr =-α1;
因此,R档反向减速增矩。
杠杆图计算:
同样的,ns1为输入端;nc=0 ;nr为输出端。
采用相似三角形:nr = ns1 / -α1
则 i=ns1/nr =-α1。