otc机器人官网、otc 机器人
在项目实际项目运行中,很少使用焊接机器人自己独立控制系统,通常需要增加PLC来组合使用;那么焊接机器人I/O与PLC的I/O需要多少点才能实现联锁控制呢?下面介绍我在实际项目的运用。
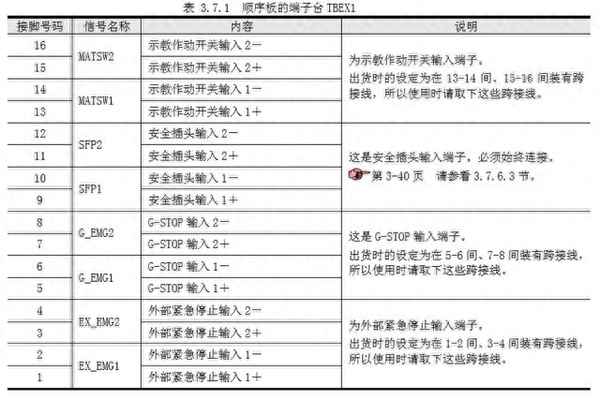
1、 机器人安全回路
紧急停止输入端子EX_EMG1、EX_EMG2
2、机器人输入(PLC输出至机器人输入)
1)机器人启动(IN97)
2)机器人停止(IN98)
3)工件准备完成(IN99)
4)报警复位(IN100)
3、机器人输出(机器人输出至PLC输入)
1)机器人原点(OUT97)
2)焊接完成(OUT98)
3)机器人启动中(OUT99)
以上I/O连接是最简洁的配置,这样组合起来就可以实现PLC与焊接机器人的交互连接完成配合逻辑动作;其他例如工装夹具控制、按钮指示灯、等外围辅助装置的动作都由PLC完成。
我是李子,欢迎大家关注我,留言交流分享!!!