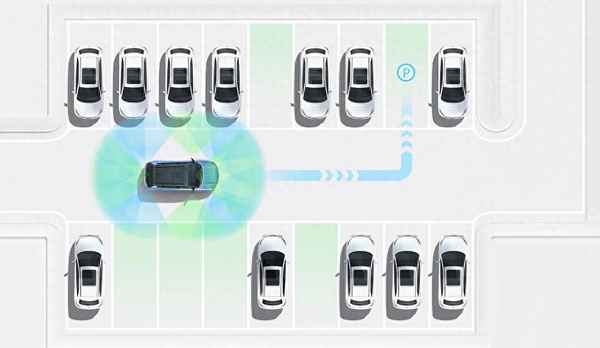
自动泊车技术原理-自动泊车技术原理图
【有车以后 话题】说到自动驾驶,大家都知道它是个“不靠谱”的技术,目前还有着很多局限,车企的任务就是不断完善相关技术,使之更靠谱。2021年,我们终于能教自己的车开车。
人教车开车?听着有点拗口,其实上它由最新的记忆泊车功能实现。记忆泊车和自动泊车有啥差别?我们来一探究竟。
威马W6实现了停车场内无人自主学习泊车功能(HAVP),小鹏通过OTA更新让P7实现了停车场内记忆泊车(VPA),还有很多车企也即将会推出类似的功能,记忆泊车可谓是2021年的风潮。
所谓的记忆泊车,就是让驾驶员在停车场内教一遍车辆如何泊车入库。车辆学会以后,再次进入停车场,汽车就会自己开到车位里,全程不需要驾驶员进行任何操作。简单来说记忆泊车分为“教学、学习、复现”三个阶段。
已经有自动泊车了,还需不需要记忆泊车?当然需要,大部分上班族其实停车花费的时间就很长,记忆泊车能把这部分时间解放出来,你到停车场门口就下车,接下来的动作就由车辆自己完成了,这才是真正的自动驾驶。
早在2017年,戴姆勒和博世就研发出了L4级的无人自主泊车功能,只不过停车场需要每间隔3个停车位就要安装一个激光雷达,成本太高了。特斯拉的FSD有智能召唤功能,不需要特定的停车场,依靠GPS,车子可召唤至跟前,局限是地下车库的GPS信号很弱。
中国车企能人所不能,开发出了记忆泊车功能,从技术上来看,记忆泊车本质上是利用传感器和摄像头对停车场进行“扫描”,数据传回“大脑”进行停车场建模,开了“地图”,就能轻松找到“位置”。
在停车场内,有许多规律可循的场景,例如规则的车位线、停放整齐的车辆,除露天停车场外,还拥有承重柱、墙面等特征物体。这些东西是不变,计算设备能够一帧一帧拼接出整个感知过程的语义特征图。同时,依靠轮速计推断车辆位置,最终能够画出一张车辆运行的地图。
小鹏和威马两车企的技术路线又有所不同,小鹏更注重视觉感知,威马更注重传感器融合。
小鹏P7在记忆泊车过程中,会开启车身全部摄像头,包括4个环视摄像头和10个高感知摄像头。环视摄像头与高感知摄像头的配合,二者配合能够对整个环境进行更精准的建模。
威马W6也调用了全部传感器,包括1个驾驶行为检测摄像头、2个前视摄像头、4个环视摄像头、5个毫米波雷达和12个超声波雷达。其中,覆盖在全车四周的6枚摄像头负责以视觉成像形式,帮助车辆感知路况和周身环境。毫米波雷达和超声波雷达在雨、雾、雪天气下表现优秀,露天停车场环境能够发挥出良好的性能。
值得一提的是,小鹏在“看”的过程中就顺便把图建成了,完全依靠小鹏搭载的英伟达Xavier自动驾驶芯片,算力能够达到30TOPS。威马则是看的时候先记下所有的感知数据,上传到百度Apollo云端服务器,它的云端算力最高能达到100万TOPS级别,为所有威马W6提供云端算力。
对于这类“自动驾驶”功能,必须得发出灵魂一问:它安全吗?小鹏和威马进入记忆泊车后,都有礼让行人的准则,点赞。
如果遇到正在行驶的车辆,此时小鹏P7则会使用毫米波雷达感知前方车辆的速度、加速度,以及与本车的距离,从而判断等待或者避让。在最终泊车阶段,也会利用超声波雷达感知近距离的障碍物。
威马W6则主要依托摄像头+超声波雷达共同识别的方案进行避障。针对行人、车辆、锥桶等常见障碍物,威马W6会通过视觉方面的特征识别,车辆即可感知障碍物的存在,并进行避让;针对箱子、沙石等不常见的障碍物,威马W6依托超声波雷达,感知障碍物。发现障碍物后,车辆会根据障碍物的当前距离进行决策,并在合适的距离自动刹停、避让。
在停车场这种低速范围内,留有足够的时间给传感器反应,所以不用担心安全问题。
目前大部分车企对自动驾驶的构想是高速-城市-停车场这三个,小鹏NGP、蔚来NOP在高速上自动驾驶功能令人满意。现在,又有了记忆泊车,接下来只剩城市道路了,编辑相信更实用的“自动驾驶”离我们并不遥远。






